Установка и обзор linux rosa fresh r10 kde
Содержание:
- Alt Linux
- Простая установка
- Сопутствующие статьи
- Выключение системы и режимы ожидания пользователя
- Где скачать Linux ROSA FRESH R10 KDE?
- Установка Rosa Linux Fresh R11
- История ОС
- Rosa Linux R11 и локальная сеть с Windows
- Комьюнити-релизы ROSA Marathon
- Linux ROSA Desktop FRESH R11
- Настройка сети
- Проблемы ROSA Fresh R11 KDE 4
- Установка сторонних программ
- Программы
- Установка
- Другие методы установки
Alt Linux
Альт 8 СП – дистрибутив операционной системы для серверов и рабочих станций со встроенными программными средствами защиты информации, сертифицированный ФСТЭК России.
Дистрибутив выпускается для следующих аппаратных платформ:
- Intel i586/x86_64;
- Эльбрус-4С/8С.
Если с Intel всё понятно, то что за зверь этот Эльбрус? 4С — четырёхъядерный процессор, работающий на частоте 800 МГц, который поддерживает работу с тремя каналами памяти. Также имеется кэш-память общим объёмом 8 МБ. Процессор произведён по технологии 65 нанометров, со средним энергопотреблением в 45 Ватт. Да-да, ещё одна отечественная разработка!
Кстати, мы проводили кросс-тестирование совместимости и подтверждаем полную совместимость доступных дистрибутивов ALT Linux с FastReport VCL (при разработке приложений на Lazarus) и FastReport Mono. Если ещё в 2018 году пользователи могли столкнуться с некоторыми несовместимостями, например, при формировании PDF, то на сегодня проведена большая работа по исправлению возможных “шероховатостей” (в частности, улучшен механизм включения и подстановки шрифтов в формируемые FastReport PDF-документы).
Но вернёмся к Альт.
Создатель этой ОС – компания «Базальт СПО», которая ориентировалась на создание своего дистрибутива, как один из вариантов “очень защищённой” ОС.
Сегодня ALT Linux Team поддерживает собственный репозиторий Sisyphus, который содержит RPM-пакеты собственной сборки и является отдельной ветвью развития Linux, не базируясь ни на каком крупном дистрибутиве.
Рабочее окружение основано на Mate, что является плюсом для людей со слабым железом. Внешний вид системы приближен к Windows XP. На мой взгляд это больше достоинство, чем недостаток, ведь мы все помним горячо любимую Windows XP.
Интересной особенностью всех ALT-систем является то, что, не смотря на формат пакетов RPM в качестве пакетного менеджера используется APT. Отлично работает классический apt-get, но современный apt не поддерживается в качестве графической оболочки используется Synaptic.
Теперь о минусах. При установке нам предлагаются достаточно интересные пресеты, один из них — поддержка стороннего ПО – это ок, другой — поддержка Windows. Если у кого-то промелькнёт мысль, что пакеты с поддержкой Windows можно будет доставить позже, то нет, позже сделать это будет нельзя. Подход достаточно странный, не сказать, что он критично на что-то влияет, но осадок неприятный остался. А так, чтобы установить рабочий экземпляр Wine нам потребуется открыть консоль и обратиться конечно же к документации.
А если официальные бумаги не особо помогли, то Альт имеет самое большое сообщество, богатую историю, и качественную поддержку. Кроме того, у них хорошо проработанная документация по продуктам, большое количество мануалов, много детализированных сценариев использования.
Отмечу, что дистрибутив Альт, по сравнению с ОС РОСА и Astra Linux, далеко ушёл от базового. Astra — это видоизменённый существующий дистрибутив, АСТРА — это Debian, а РОСА — Mandriva. А у Альта изначально был Mandrake, но разработчик настолько его изменил, что базовый дистрибутив уже не разглядеть.
Системные требования:
- Оперативная память: от 1 Гб, рекомендуется 8 и больше Гб (а для виртуализации рекомендуется не менее 16 Гб ОЗУ и двухпроцессорная система или лучше);
- Жёсткий диск: от 32 Гб, рекомендуется 200+ Гб (для всё той же виртуализации рекомендуется аппаратный RAID-контроллер);
- Сеть: порт Ethernet;
- Периферийное оборудование: стандартное, есть возможность использовать без монитора.
Простая установка
Для установки операционной системы ROSA Linux нужно подготовить компьютер, выбрать и скачать образ, записать его на USB-накопитель («флэшку») или диск DVD и, наконец, установить систему. Все это не так сложно и, если ваш компьютер окажется хорошо совместимым с ROSA Linux, даже начинающий пользователь может справиться с установкой.
Примечание
Очень и очень рекомендуется перед началом такой важной операции, как установка ОС, сделать резервную копию важных файлов на вашем компьютере.
Подготовка компьютера
Проще всего ставить ROSA Linux на пустой диск или с удалением всей информации на диске. Но такой вариант не слишком удобен — скорее всего у вас есть важные документы или фотографии, а может быть вы хотите сохранить Windows или другую систему рядом с ROSA Linux, чтоб иметь возможность работать и там, и там.
Если у вас уже установлена другая система и вы хотите сохранить её, возможно понадобиться расчистить свободное место для нашего линукса. Мы рекомендуем использовать те инструменты, что встроены в вашу, уже установленную систему для изменения разделов на диске так, чтоб осталось свободное, неразмеченное место объемом не менее 20 ГиБ. Инсталлятор ROSA Linux и сам это умеет делать, но обычно любая система обрабатывает свои разделы наиболее корректно. Также, если вы используете последние версии Windows, рекомендуется отключить в них технологию «быстрого старта» командой
powercfg -h off
Примечание
Рекомендуется делать установку на компьютере, подключенном к сети Интернет с помощью кабеля. Это позволит инсталлятору автоматически определить ответы на большинство вопросов и сделает возможным установку драйверов для wifi (если они сразу не определятся)
Выбор образа и окружения рабочего стола
Актуальные образы ROSA
- ROSA Desktop Fresh R11 — первый релиз платформы 2016.1, который будет поддерживаться 4 года, в соответствии с политикой выпуска, до окончания разработки новой платформы 2018.1. R9 отличается новыми версиями программ и рекомендуется прежде всего для энтузиастов.
- ROSA Desktop Fresh R8.1 — Для пользователей, предпочитающих стабильность.
Окружения рабочего стола
В отличие от Windows, в ROSA Linux вы можете выбрать различные оболочки-окружения рабочего стола по своему вкусу и скачать образ с ними.
Доступные окружения рабочего стола:
Дистрибутив ROSA R8
-
-
- ~ KDE4 R8.1 ~:::~GNOME_R8 ~:::~ PLASMA_R8~:::~MATE_R8~
-
Дистрибутив ROSA R9
-
-
- ~ KDE4 R9 ~:::~GNOME R9 ~:::~ PLASMA R9~:::~LXQt_R9~
-
Также доступны две архитектуры — i586 и x64, соответственно — 32-разрядная и 64-разрядная.
64-разрядная использует значительно больше оперативной памяти но работает несколько быстрее, 32-разрядные программы, например skype или steam в 64-разрядной системе работают нормально. Также нужно учитывать, что некоторые программы, например viber или WarThunder доступны только в 64-разрядном исполнении а значит для них нужна 64 разрядная система. Современные компьютеры также используют технологию UEFI.
Вкратце, если у вас современный компьютер с более чем 2 Гиб памяти, то выбирайте образ x64UEFI, если же памяти 1 или 2 Гиб — 32-разрядную архитектуру i586.
Примечание
Вы можете оценить, как будет работать на вашем компьютере выбранный вами образ ROSA Linux и без установки, для этого нужно загрузиться в Live-режиме, выбрав в меню загрузки Start ROSA Desktop
Запись образа на USB-накопитель и загрузка с него
Чаще всего ROSA Linux устанавливают на компьютер с помощью USB-накопителя. Для установки вам понадобится флэшка объемом 4ГиБ или более и программа ROSA ImageWriter. Выберите в этой программе вашу флэшку и выбранный вами образ и нажмите «Записать»
Теперь вам нужно перезагрузиться с флэшки. Обычно для этого нужно выбрать порядок перезагрузки в BIOS вашего компьютера. Как это сделать зависит от конкретной модели компьютера и описано в его документации, часто для этого используются нажатие клавиш F12 или F2 в самом начале загрузки.
Если вы расчистили перед установкой место для ROSA Linux, выберите в инсталляторе установку на свободное место.
Большинство вопросов, возникающих при установке, может быть разрешено с помощью Errata
Сопутствующие статьи
- Обзор Роса R11 KDE
4 - Обзор AlterOS 1.5.1
- Обзор Роса Линукс R7
- Обзор Альт Линукс 7
- Обзор Astra Linux 2.11
- Обзор openSUSE 12.3 Milestone Live
P.S.
Если вы живете в г. Краснодар и страстно желаете установить Роса
Linux
или просто «пощупать» ее — звоните или пишите: Подробнее…
Поделитесь этим сайтом с друзьями!
Если вам оказалась полезна или просто понравилась эта статья, тогда не стесняйтесь — поддержите материально автора. Это легко сделать закинув денежек на Яндекс Кошелек № 410011416229354. Или на телефон +7 918-16-26-331.
Даже небольшая сумма может помочь написанию новых статей 🙂
Или поделитесь ссылкой на эту статью со своими друзьями.
Выключение системы и режимы ожидания пользователя
Важно правильно заканчивать работу операционной системы чтобы избежать проблем при последующем запуске. Это можно сделать используя SimpleWelcome, в правом верхнем углу которого располагаются иконки завершения работы (большой красный круг) и блокировки текущего сеанса (желтая кнопка поменьше).
Если вы хотите полностью закончить работу компьютера, нажмите на значок завершения работы и в появившемся меню выберите «Выключить компьютер».. Окно выключения компьютера

Окно выключения компьютера
Вы также можете выбрать «Спящий режим», который отличается тем, что полностью обесточивает компьютер, но сохраняет на жесткий диск информацию о вашем сеансе: о запущенных приложениях, состоянии рабочего стола и о многом другом. Во время следующей загрузки ваш сеанс будет восстановлен.
Для доступа к режимам ожидания пользователя следует открыть SimpleWelcome, нажать на значок завершения работы, а затем нажать, не отпуская, на кнопку «Выключить компьютер». Через секунду появится список, в котором вы можете выбрать тот режим, который вам подходит.
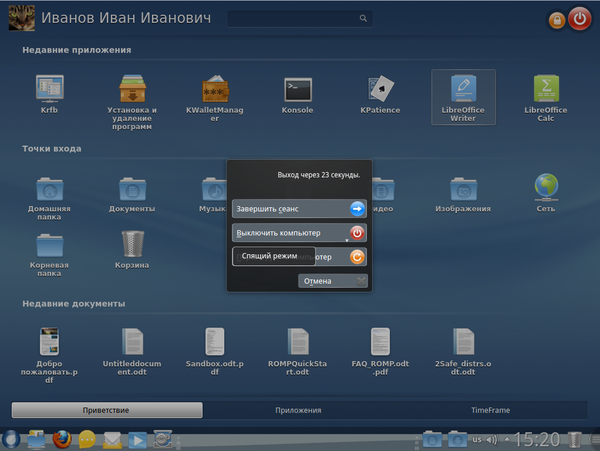
Окно выключения компьютера, выбор спящего режима
Если вы используете ноутбук, то также вы можете найти в трее индикатор батереи. После щелчка по нему появится окно с подробной информацией о состоянии аккумулятора. В самом низу будет кнопка «Спящий режим». Выключить компьютер из этого окна нельзя.
Где скачать Linux ROSA FRESH R10 KDE?
Скачать актуальную версию ROSA FRESH можно со страницы загрузки официального сайта – вот она.
После того как Вы перешли на страницу Вам необходимо найти раздел с нужной версией дистрибутива и щелкнуть по соответствующей ссылке, например, для того чтобы скачать 64 битную версию ROSA FRESH R10 KDE ссылка следующая.
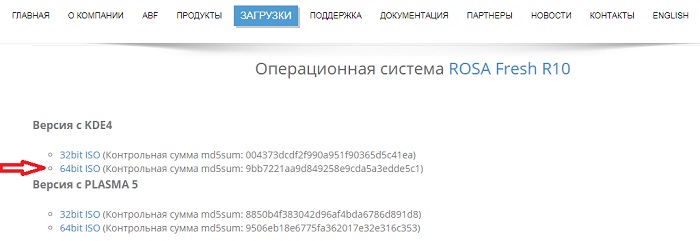
В итоге у Вас должен загрузиться iso образ ROSA.FRESH.KDE.R10.x86_64.uefi.iso размером примерно 2 гигабайта.
Также найти ссылки на скачивание можно и на зеркале Yandex.
Там, кстати, есть и ссылки на загрузку торрент файлов, для того чтобы скачивать дистрибутив через торрент клиент.
Установка Rosa Linux Fresh R11
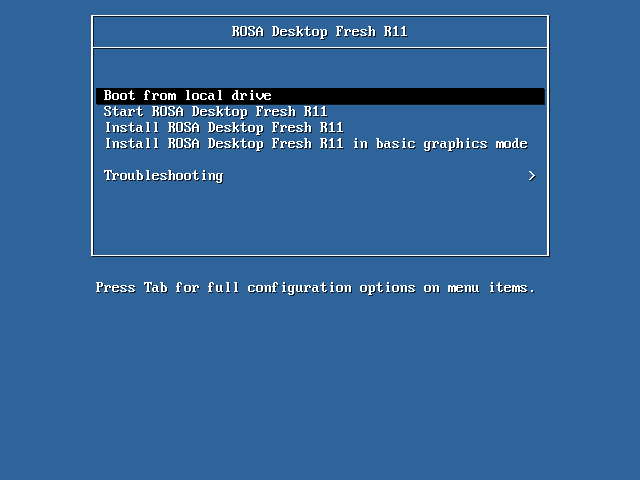
1. Загрузка Live-системы
Уже в основном меню образа вы можете выбрать пункт Install ROSA Desktop Fresh R11 и сразу перейти к установке. Но я не рекомендую так делать. Лучше загрузить систему с LiveCD-образа, а уже потом запускать установку. Так вам проще будет исправлять ошибки, если они возникнут. Поэтому выберите пункт Start ROSA…

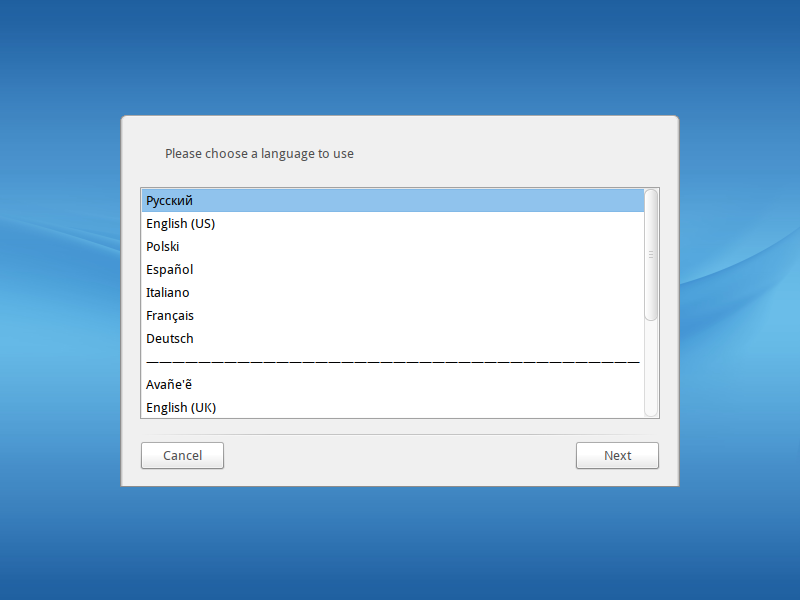
2. Выбор языка
Перед тем, как вы сможете воспользоваться Live-окружением, необходимо его немного настроить. Сначала выберите язык:
Прочитайте и примите лицензионное соглашение:
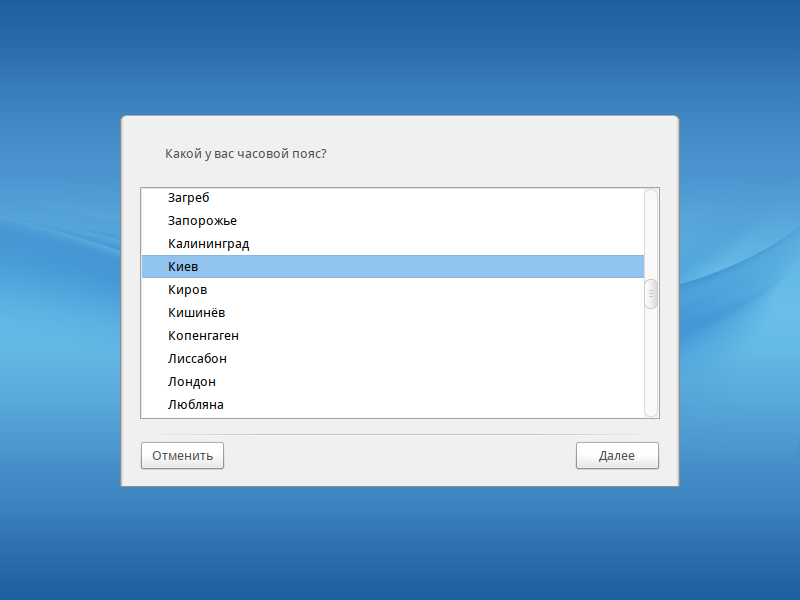
5. Настройка часового пояса и времени
Выберите часовой пояс. Меню выбора не очень удобное, так как нет значений отклонения от GMT:
Затем выберите, каким образом нужно сохранять и восстанавливать дату между перезагрузкамип: по местному времени или по UTC:
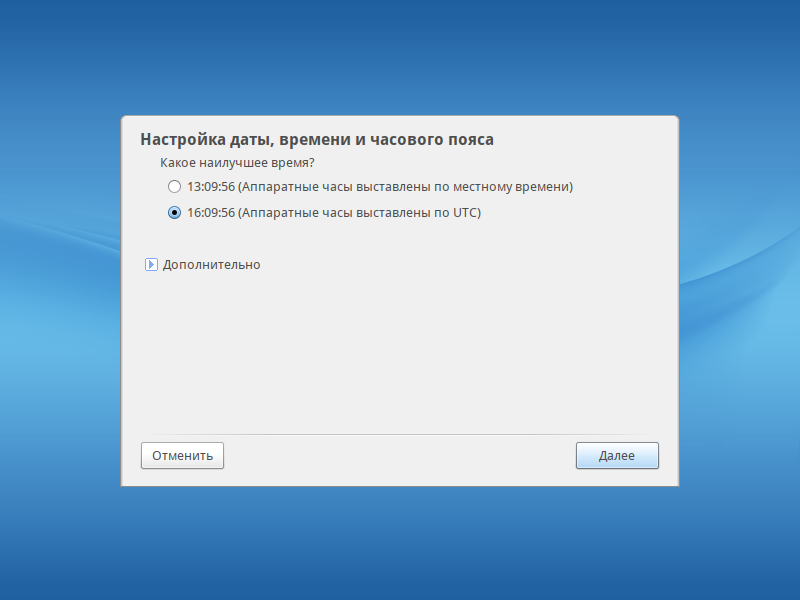
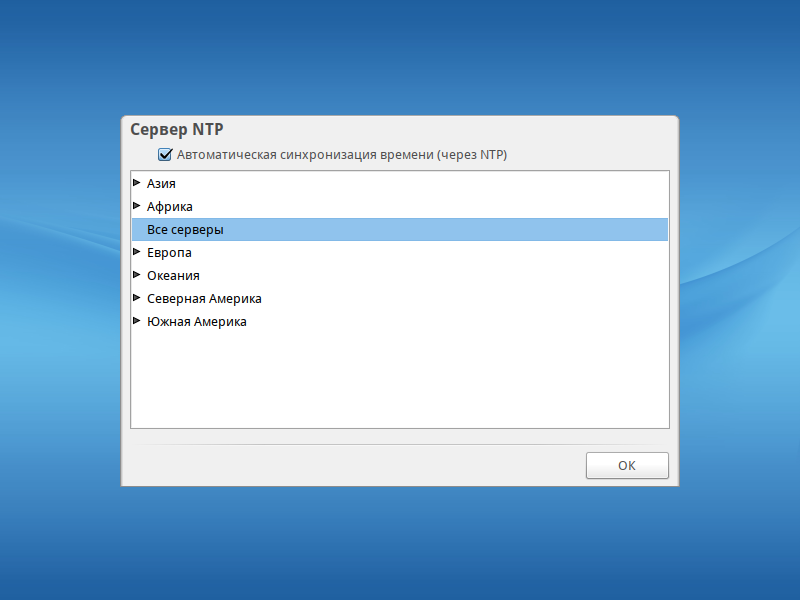
Раскрыв вкладку дополнительно, вы можете включить синхронизацию времени с интернетом с помощью NTP-сервера:
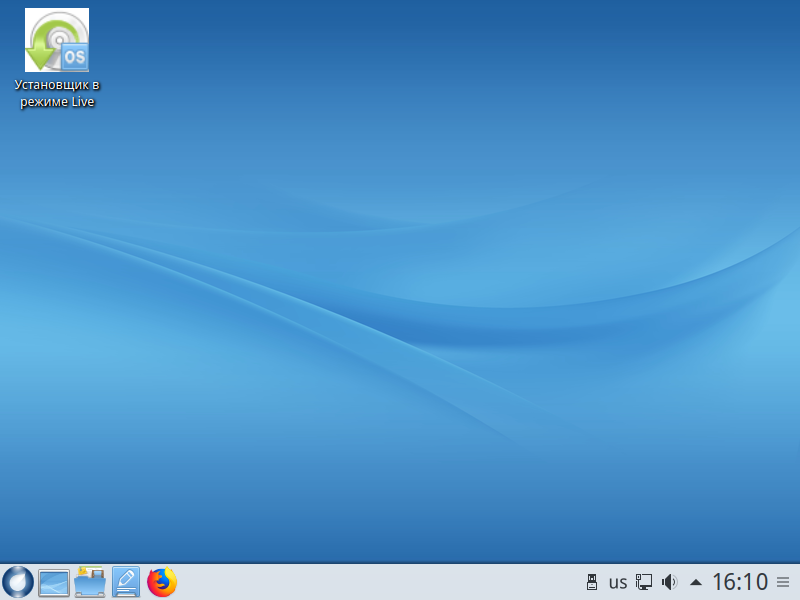
6. Запуск установщика
Только после всех этих настроек вы окажетесь в Live-окружении. Здесь вы можете посмотреть, что из себя представляет система, запускать программы и так далее. Чтобы запустить установку, выполните двойной клик по ярлыку Установщик в режиме Live:
На первом шаге установщика просто нажмите кнопку Далее:
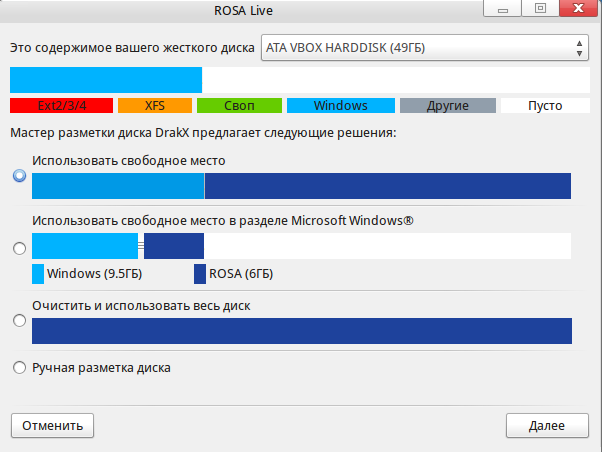
7. Способ разметки диска
Здесь у вас есть два варианта. Либо позволить дистрибутиву разбить диск автоматически и использовать всё свободное пространство, или создать разделы вручную:
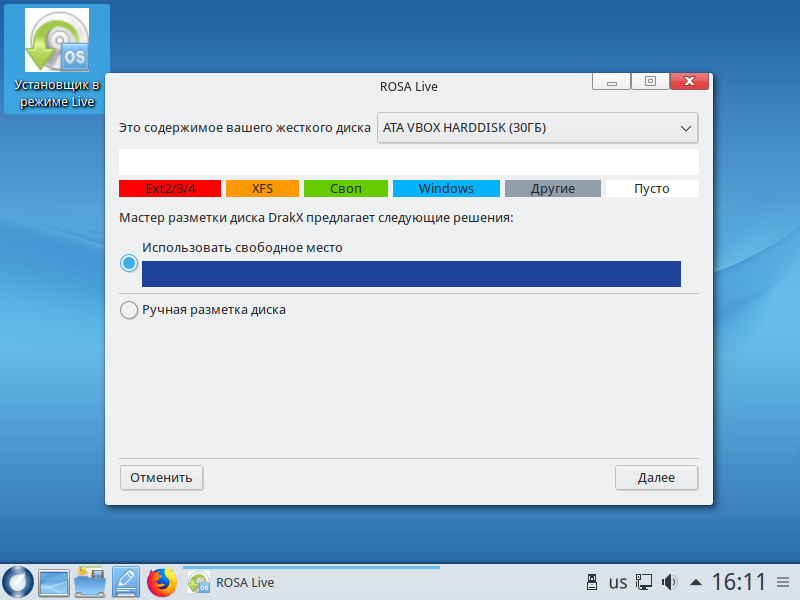
В этой инструкции мы будем разбивать диск вручную. Поэтому выберите Ручная разметка диска.
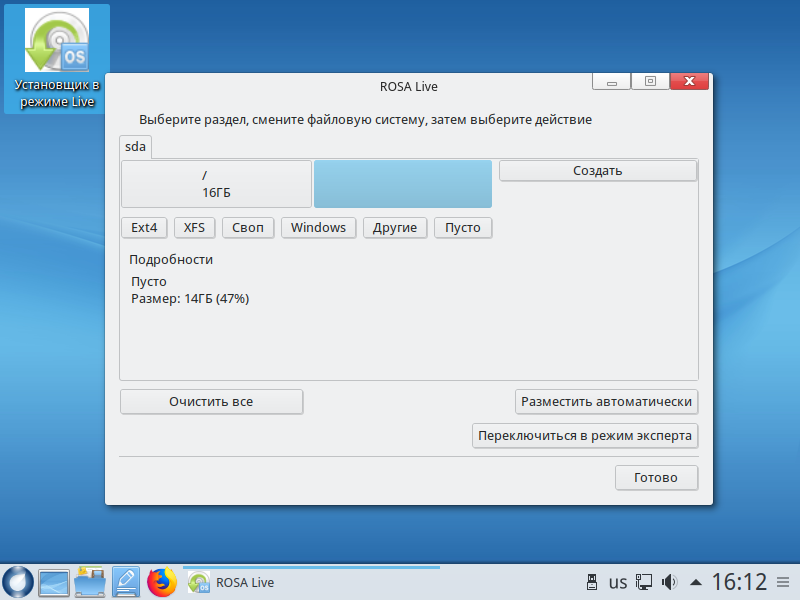
8. Создание корневого раздела
Дальше откроется окно редактора разделов. Щёлкните по свободному месту, чтобы его выделить. У меня никаких систем больше не установлено, поэтому все место свободное:
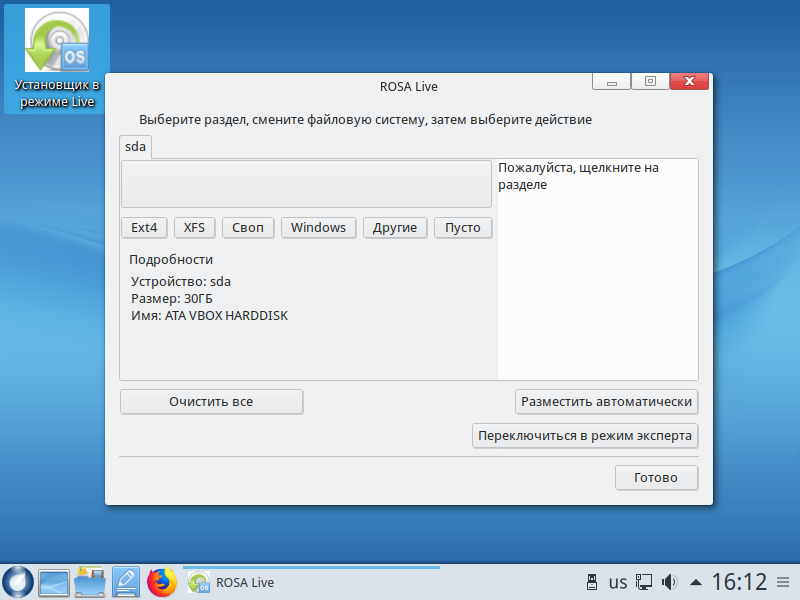
Затем кликните по кнопке Ext4, чтобы создать новый раздел с этой файловой системой.
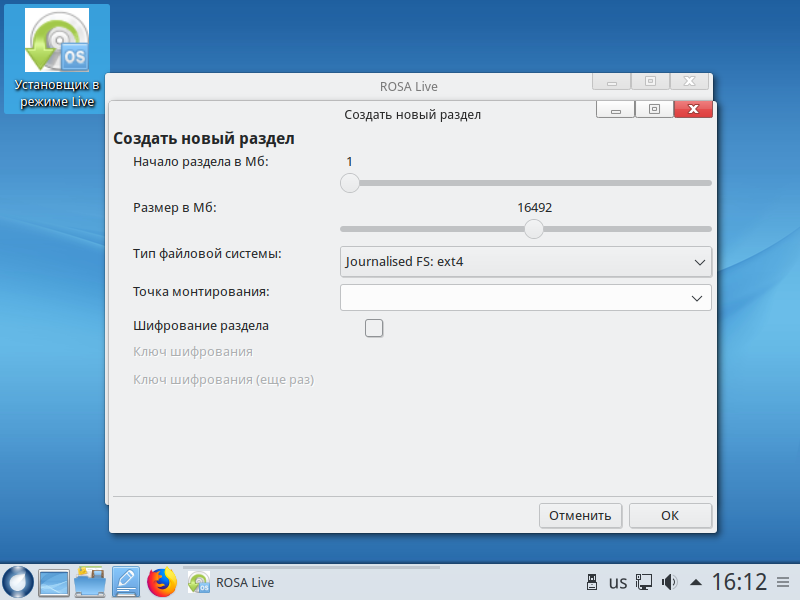
В окне настроек раздела нужно выбрать его размер. Для корневого раздела я рекомендую брать не менее 20 гигабайт, так как здесь будут хранится все системные файлы, журналы и файлы приложений. Начало раздела оставляем там, где оно есть, а в параметре Размер в мб устанавливаем нужный размер корневого раздела. В качестве точки монтирования нужно выбрать /. Затем нажмите Ок.
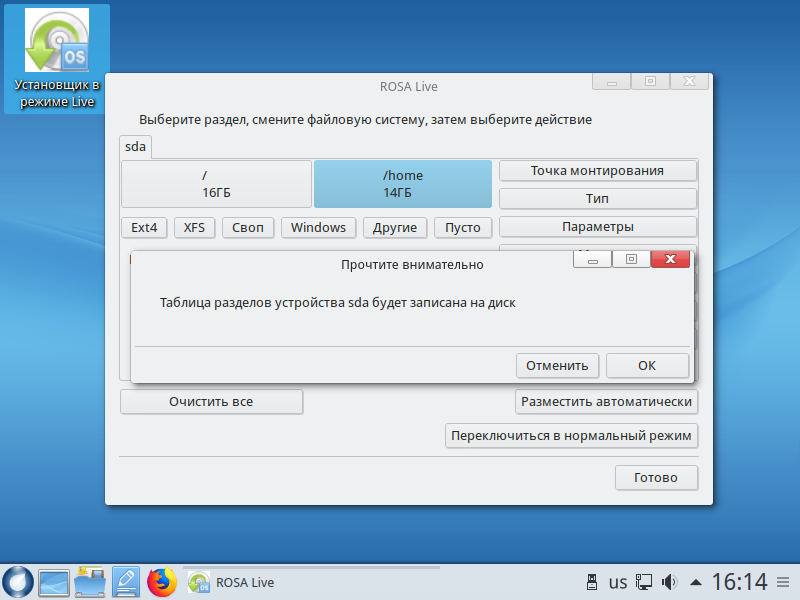
9. Создание домашнего раздела
У вас появился корневой раздел. Теперь создадим домашний. Для этого кликните по свободному месту, чтобы оно стало выделенным:
И снова нажмите Ext4. Домашний раздел создаётся аналогичным образом, только в качестве точки монтирования нужно выбрать /home, а его размер уже выбирайтет такой, как вам нужно, — там будут ваши файлы, видео, фильмы, музыка и всё, с чем вы будете работать. Можно выделить всё доступное пространство.
10. Подтверждение разметки
После того, как разбивка будет завершена, нажмите кнопку Готово, а затем согласитесь с тем, что таблица разделов будет записана на диск:
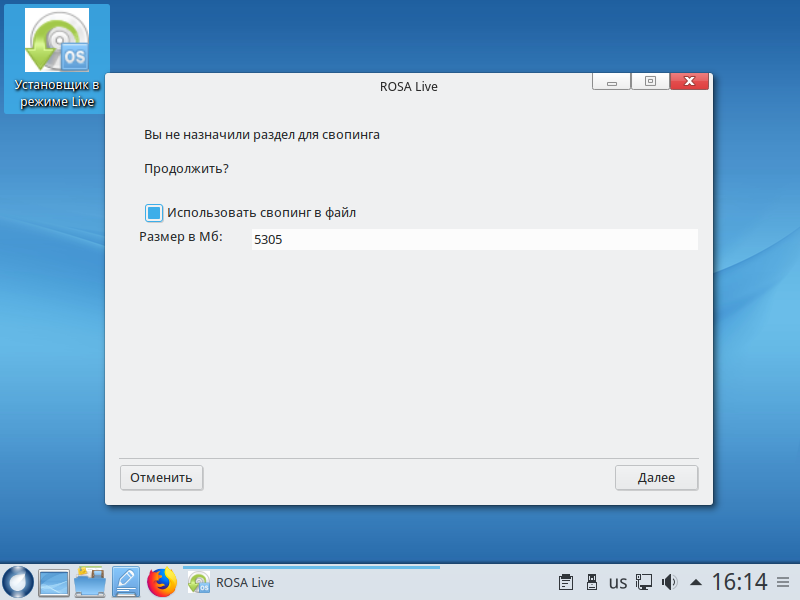
11. Создание файла подкачки
Если вы не создали раздел подкачки во время разбивки диска, то утилита предложит вам создать файл подкачки. Его размер должен быть не меньше размера оперативной памяти, если вы хотите использовать режим сна или гибернацию.
Дождитесь, пока закончится распаковка файлов и установка:
13. Установка загрузчика
Выберите диск, на который нужно установить загрузчик и интервал до начала загрузки с пунктом по умолчанию:
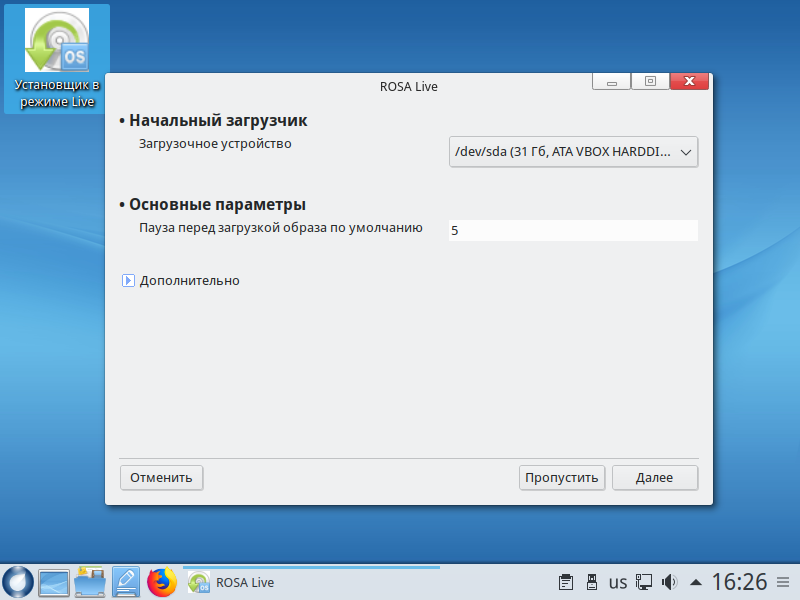
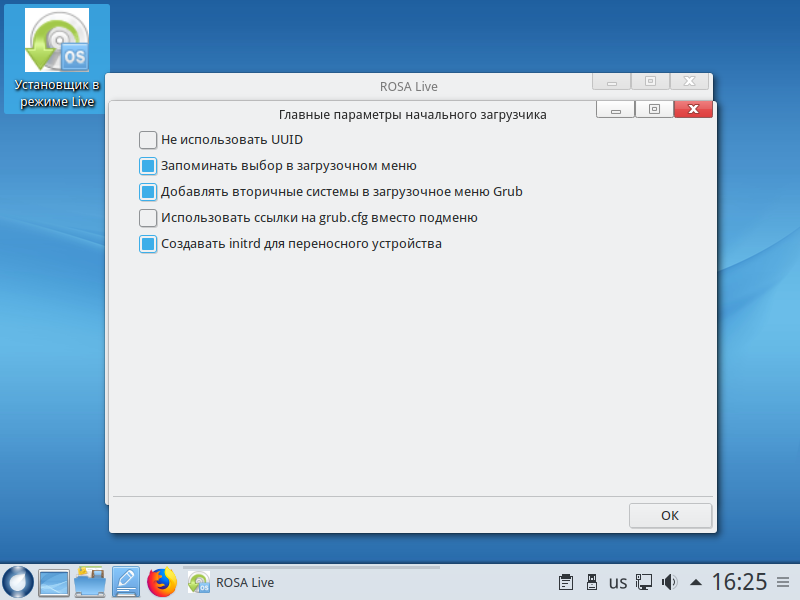
Нажав кнопку Дополнительно, вы можете настроить дополнительные параметры загрузчика:
Введите пароль для пользователя root:
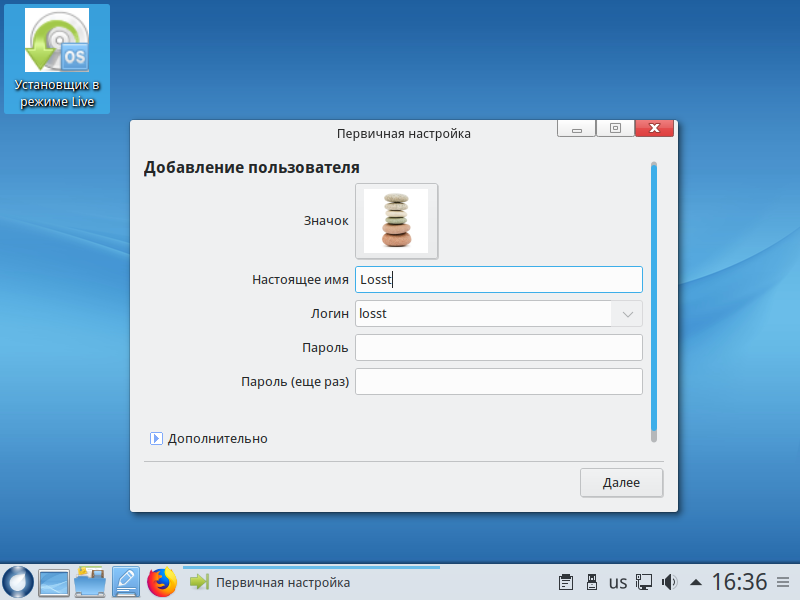
15. Создание пользователя
Введите имя, логин и пароль для пользователя, от имени которого вы будете пользоваться системой:
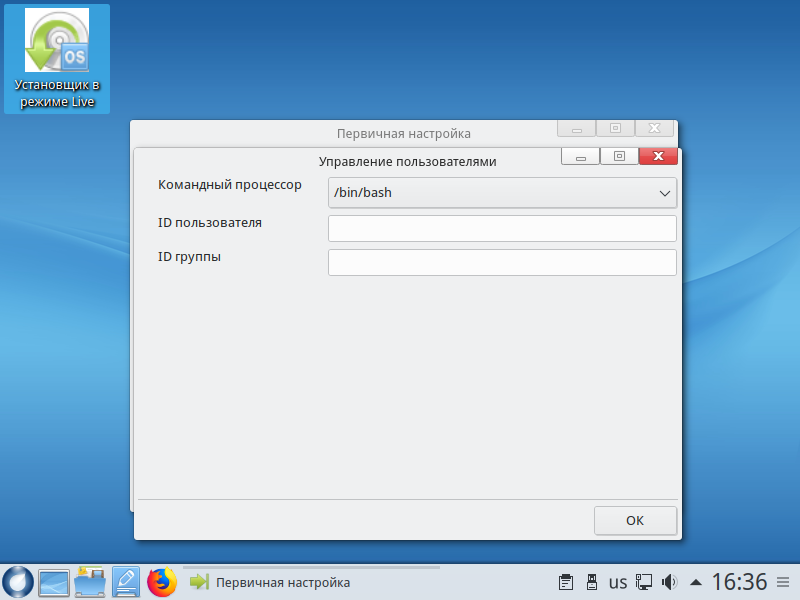
Нажав кнопку Дополнительно, вы можете выбрать интерпретатор команд и указать ID пользователя и группы вручную:
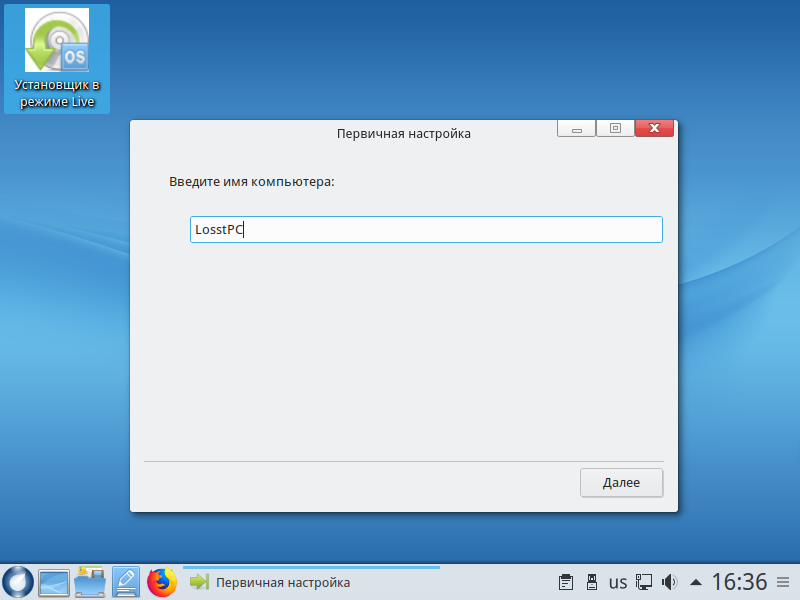
Введите имя компьютера, оно будет отображаться в терминале, а также для других устройств в локальной сети:
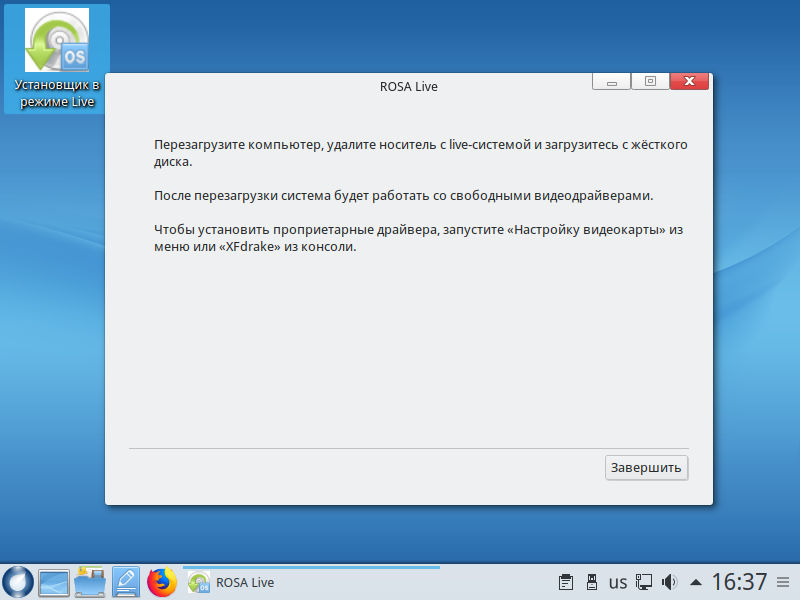
Закройте мастер установки и перезагрузите компьютер:
Введите логин и пароль пользователя, которого вы создавали во время установки:
История ОС
Разработка российского дистрибутива началась в 2007 году. Далее проходили исследования параллельно с разработками инструментария. Разработчиком и производителем ОС в 2010 году является группа компаний «РОСА».
В последующем были привлечены отдельные компании, занимавшиеся дополнительными исследовательскими задачами. Название было выбрано как сокращение от «Российские операционные системы».
За основу настольной версии была выбрана ОС Linux Mandriva. Сам вариант поставляемого дистрибутива именовался «Desktop Fresh R», где после шёл числовой номер версии.
В данное время наименование изменено. Первым словом поставлено ROSA. Как ROSA Fresh R10 или ROSA Fresh R9.
В качестве основы серверного варианта поставки была выбрана ОС Red Hat Enterprise Linux. Операционная система тоже известна профессионалам и обыкновенным пользователям.
Изначально ставилась задача разработки операционной системы для государственных органов, спецслужб. Потом основной разработанной продукцией стали сертифицированные ФСТЭК и МОРФ дистрибутивы.
Вплоть до 2012 года линукс rosa в сборке указанных операционных систем являлась дополнением. Позже уже начали появляться дистрибутивы собственной сборки. А о всех новинках заинтересованные лица могут ознакомиться в специализированном печатном издании «Точка РОСЫ». Здесь регулярно появляются материалы, где производится обзор функционала очередной операционки ROSA Linux.
Rosa Linux R11 и локальная сеть с Windows
Все дистрибутивы я тестирую на возможность работы в гетерогенной
локальной сети (в сети где есть компьютеры Linux и Windows).
К компьютерам Windows мне удалось подключиться. Обзор сети в файловом
менеджере не работает, но это сейчас во всех новых версиях всех
дистрибутивов. Пришлось писать сетевой адрес вручную и Rosa Linux нормально подключился к компьютерам Windows.
Однако для разных версий Windows адрес нужно писать по разному.
Для подключения к Windows XP достаточно указать
имя или адрес — smb://compname. А для подключения
к Windows 7 нужно указывать имя пользователя и сетевую папку —
smb://username@compname/shared-folder/. Если написать обычный адрес, будет
ошибка соединения. Почему разработчики дистрибутива допустили
такой разнобой, я не знаю. Для сравнения, Ubuntu к
разным версиям Windows подключается одинаково — smb://compname.
Раздать файлы с Rosa Linux тоже удалось. Сервер Samba был установлен «из
коробки», GUI интуитивно понятен — вкладка в свойствах папки (в
файловом менеджере). Но Windows 7 «не видит» компьютер с Росой с своем
обозревателе сети. Однако возможно подключиться к Росе по
IP-адресу.
Ошибка при работе с сетевыми файлами
Если в Долфин открыть (одновременно или последовательно) несколько разных
папок и файлов на компьютере (или компьютерах) Windows, тогда возникает
ошибка доступа к сетевым данным. При открытии или сохранении открытого
файла, Долфин выдает непрерывные запросы на авторизацию. Таким образом
сохранить открытый сетевой файл не удается. Эту ошибку можно победить, если
удалить все сетевые пароли в kwalletmanager. После удаления, Долфин выдает
запрос на сетевую авторизацию и эта авторизация проходит нормально.
Комьюнити-релизы ROSA Marathon
| • Краткое описание ROSA LXDE 2012 LTS |
| • Краткое описание ROSA Marathon 2012 GNOME Edition |
|
Версия 64-бит Вышла: 7 августа 2012 |
Версия 64-бит Вышла: 20 июня 2012 |
| • Обзор релиза ROSA Desktop 2011 Extended Edition |
| • Обзор релиза ROSA Desktop 2011 |
| • 2011.0 Errata |
| • Список известных проблем в ROSA Desktop 2011 |
|
32 бит Дата выхода: 23-Dec-2011 64 бит Дата выхода: 23-Dec-2011 32 бит Дата выхода: 28-Aug-2011 64 бит Дата выхода: 28-Aug-2011 |
| • Обзор релиза ПСПО6 |
| • Список известных проблем в ПСПО6 |
|
32 бит Дата выхода: 31.01.2012 |
Релизы ROSA Desktop 2011 GE (Gnome Edition) выпускаятся сообществом пользователей РОСА.
Linux ROSA Desktop FRESH R11
ROSA Desktop FRESH – это бесплатный дистрибутив операционной системы Linux, предназначенный для домашних компьютеров. Его можно абсолютно свободно без каких-либо регистраций скачать и установить на домашний компьютер.
Разработкой и поддержкой дистрибутива занимается Российская компания «РОСА» (ООО «НТЦ ИТ РОСА»), поэтому на этот дистрибутив точно стоит обратить внимание. На текущий момент актуальной версией дистрибутива является версия ROSA Desktop FRESH R11, она доступна с графическими оболочками: KDE 4, KDE Plasma 5, Xfce и LXQt
Сегодня, как я уже отметил, подробно мы остановимся на редакции с Plasma 5
На текущий момент актуальной версией дистрибутива является версия ROSA Desktop FRESH R11, она доступна с графическими оболочками: KDE 4, KDE Plasma 5, Xfce и LXQt. Сегодня, как я уже отметил, подробно мы остановимся на редакции с Plasma 5.
Также стоит отметить, что дистрибутив Linux ROSA FRESH выпускается для архитектур процессора i586 (32 битная версия) и x86_64 (64 битная версия), а что самое главное, у него отличная русификация, это и понятно, ведь дистрибутив разработан в России.
Кроме того, по умолчанию в дистрибутив включено все необходимое программное обеспечение для работы за компьютером (офисный пакет, браузер, торрент клиент и другие приложения), но этим, наверное, никого не удивишь, ведь практически все дистрибутивы Linux, которые ориентированы на пользователей домашнего компьютера, включают такой стандартный набор приложений, с учетом того, что в репозиториях хранятся еще сотни полезных программ, и ROSA FRESH не исключение.
Ко всему прочему, так как дистрибутив ROSA FRESH ориентирован на начинающих пользователей Linux, в него включен удобный графический инструмент управления приложениями — «Установка и удаление программ», благодаря которому процесс установки программ в ROSA FRESH становится очень простым.
Особенности Linux ROSA FRESH R11 KDE Plasma – обзор нововведений
Сейчас давайте рассмотрим основные особенности новой версии Linux ROSA FRESH R11 на примере редакции с KDE Plasma, иными словами, узнаем, что нового появилось в этой версии.
- Ядро Linux 4.15;
- KDE Frameworks 5.53.0
- Plasma 5.14.4;
- KDE Applications 18.12.1;
- Qt 5.11.2;
- Основной браузер Firefox-ESR60, дополнительный Chromium 72;
- Медиапроигрыватели ROSA Media Player и Clementine;
- Офисный пакет LibreOffice 6.0.7.3;
- Torrent-клиент qbittorrent 4.1.4;
- Графический редактор GIMP 2.10.6;
- Редактор аудиофайлов Audacity 2.2.2;
- По умолчанию используется классическое меню Kicker;
- В Plasma есть дополнительный апплет «Все рабочие столы»;
- «Установка и удаление программ» от ROSA интегрирована в центр управления Plasma;
- Предустановленные нестандартные драйверы для популярных WiFi-адаптеров;
- Поддержка загрузки на системах с UEFI;
- Добавлена поддержка установки системы на M.2 и NVME SSD;
- В целях экономии ресурсов системы служба индексирования и поиска Baloo по умолчанию отключена;
- В программу установки добавлена поддержка файловой системы для флэш-накопителей F2FS;
- Доработана графическая подсистема для поддержки работы системы в виртуальных машинах на базе KVM и Hyper-V (доступно в специальных дополнительных образах);
- В установочные образы добавлены файлы firmware для поддержки сканеров Epson (насколько мне известно, ранее была проблема со сканерами Epson);
- По умолчанию используется создание универсального initrd вместо адаптированного под конкретное железо;
- Все компоненты системы обновлены до новых стабильных версий (исправления ошибок).
Системные требования Linux ROSA FRESH R11 KDE Plasma
К основным системным требования относится:
- Наличие хотя бы 10 гигабайт свободного места на жестком диске (рекомендовано разумеется больше);
- И минимум 1 гигабайт оперативной памяти для 32-битных версий и 2 Гб для 64-битных версий.
Я ставил 64-битную версию Linux ROSA Desktop FRESH R11 на виртуальную машину с 2 гигабайтами оперативной памяти, и каких-то серьезных проблем с быстродействием системы не обнаружил.
Настройка сети
Настройка сетевых и wifi карт Mediatek/Ralink и Realtek
Для следующих карт в репозиториях Росы есть дополнительные драйвера, попробуйте вашу карту с ними:
- Mediatek MT7630E — dkms-mt7630e
- Realtek RTL8812AU — dkms-rtl8812au
- Realtek RTL8723BE, RTL8723AE, RTL8192CE, RTL8192SE, RTL8192DE, RTL8188EE, RTL8192EE, RTL8821AE — dkms-rtlwifi_new
- Realtek RTL8101/2/6E — dkms-r8101
- Realtek RTL8168*/8111* — dkms-r8168
Настройка сетевых карт Broadcom
По-умолчанию используется драйвер wl, но можно попробовать драйвер b43. Для этого установите пакет
b43-firmware, удалите пакет dkms-broadcom-wl и перегрузитесь.
Проблемы ROSA Fresh R11 KDE 4
Серьезных проблем я не обнаружил. По мелочам есть.
Традиционно, для дистрибутивов последних лет, обзор локальной сети не работает. Но
можно подключиться к другому компьютеру через прямой ввод сетевого адреса.
Расшаренные ресурсы Росы не сразу стали видны на компьютерах
Windows. А только после выключения и включения
компьютера с Росой.
Плеер Росы, кстати плеер их собственный, не может открыть некоторые файлы
через сеть (с компьютера Windows), но локально эти
же файлы он открывает.
Если на компьютере две звуковых карты — встроенная в материнскую плату и
HDMI на видеокарте, тогда звук «раздваивается». Системные звуки
выводятся на HDMI, а звук от
воспроизведения видео или аудио уходит на встроенную звуковую карту. И это
может сбить с толку, проверяешь звук и он есть, но когда включаешь видео звука нет.
Для решения проблемы нужно в настройках звука, вручную переключаться на
HDMI.

Апплет настроек дисплея не дает настроек по подключению через
HDMI, пустая вкладка:
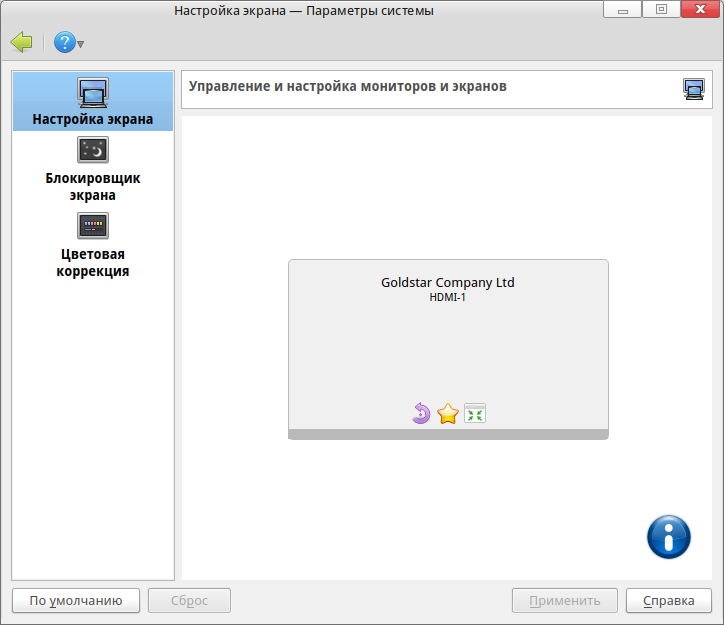
Но, автоматически, разрешение устанавливает правильно, в отличии от
Альт Линукс 8.2, который с HDMI, похоже совсем не
дружит.
Установка сторонних программ
Недавно я добавил еще один тест для дистрибутивов Линукс. Возможность
установки прикладных программ не из репозитария дистрибутива. Такая
возможность сегодня актуальна. Например браузер Google
Chrome или программа Skype
редко в каких репозитариях есть, но их можно скачать с официальных сайтов.
Итак. В Rosa Linux используются установочные
программные пакеты rpm типа. Что у меня
получилось.
Браузер Opera. Пакет в rpm
формате, скачанный с сайта Opera.com установился и
браузер работает.
Браузер Google Chrome. Пакет в
rpm формате, скачанный с сайта
Google.com установился и браузер работает. Но потребовалась установка
нескольких связанных пакетов из репозитария Росы, эти пакеты были
установлены автоматически.
Skype. Пакет в rpm
формате, скачанный с сайта Skype.com не устанавливается. Но в репозитарии Росы
есть пакет get-skype. Он устанавливается «из
коробки» и доступен через меню приложений — ярлык «Skype Install».
Запуск этого пакета устанавливает Skype и Скайп работает.
TeamViewer. У меня не получилось установить эту программу. Текущие
версии программы требуют КДЕ 5, а единственная старая, которую я нашел на их
сайте (версия 9), не работает на Росе 11.
В целом неплохо. Тест пройден. TeamViewer далеко не всем нужен и есть
альтернативы этой программе. В крайнем случае можно установить библиотеки
KDE 5.
Однако нужно иметь в виду, что проблема устаревшей версии КДЕ может
возникнуть с другими программами. Кстати, есть сборка с
KDE 5, называется Rosa Fresh Plasma 5. Обзор этой
сборки я сделаю позже.
Программы
В состав дистрибутива включено необходимое для большинства рядовых пользователей предустановленное программное обеспечение. В зависимости от выбранной редакции, состав программ может немного отличаться.
Для редакции KDE 4 используются следующие предустановленные приложения:
- Firefox
- LibreOffice
- LibreOffice Writer
- LibreOffice Calc
- LibreOffice Impress
- LibreOffice Draw
- LibreOffice Math
- GIMP
- Thunderbird
- Audacity
- Clementine
- Gwenview
- qBittorrent
- И другие…
В легковесной редакции LXQt программ значительно меньше. Вместо Firefox используется браузер New Moon, отличающийся низким потреблением ресурсов. В редакции XFCE предустановлен браузер Chromium.
Программы, разработанные ROSA
Разработчики создали несколько собственных программ и утилит, которые включены в состав дистрибутива. Некоторые из них основаны на других OpenSource продуктах.
- RocketBar — панель для запуска приложений.
- SimpleWelcome — лаунчер для среды KDE.
- TimeFrame — доступ к документам по дате обращения (используется наглядная временная строка).
- ROSA Media Player — видео-проигрыватель.
- ROSA ImageWriter — программа для записи ISO образа на флешку.
- ROSA Freeze — средство для заморозки состояния системы. Позволяет откатываться на предыдущее состояние системы после выполнения каких-либо административных манипуляций, например, установку программ.
Установка
Не получается установить систему с USB-флэшки
- Проверьте контрольную сумму образа с помощью checkisomd5 <имяобраза>. Если проверка выдаст ошибку, скачайте образ еще раз.
- Используйте для записи флэшки программу ROSA ImageWriter, она есть под Linux, Windows и Mac
- Попробуйте другую флэшку и другой USB-порт
- Если у вас UEFI система, войдите в BIOS и переключитесь в legacy режим. Также иногда помогает обновление BIOS до последней версии.
- Если ничего не помогает, поставьте систему с DVD, записав его на второй скорости
Инсталлятор предлагает перезагрузку и автоматом форматирует в btrfs
Такое поведение иногда бывает при инсталляции в виртуальной машине или на диск без таблицы разделов.
Просто попробуйте еще раз, выбрав «Очистить весь диск» или свою разметку, ошибка больше не повторится.
Другие методы установки
Установка в VirtualBox
Образ ROSA Linux полностью подготовлен для установки в VirtualBox, гостевые расширения уже установлены. Создайте виртуальную машину с 2 гб оперативной памяти и 10 Гб диском — и инсталлируйте!
Не забудьте добавить поддержку PAE для i586 образов. Подробнее можно прочитать в Установка ROSA Desktop в VirtualBox
Запись образа в консоли
Чтобы записать образ в текстовом режиме консоли (это возможно только в ОС семейства Linux):
- Установите пакет «dd_rescue».
- Вставьте флэш-накопитель в USB разъем.
- Дайте команду от Root (предполагаем, что ваша флэшка видна системе как /dev/sdb, это можно проверить командой blkid)
Предупреждение
Осторожно! Если вы неправильно укажете диск для записи в командах ddrescue или dd, то его содержимое будет уничтожено!
dd_rescue -A ROSA.iso /dev/sdb
Также образ можно записать с помощью команды dd с параметром bs=8M например:
dd if=ROSA.iso of=/dev/sdb bs=8M;sync